CS 548 - Robot Motion Control and Planning
Assignment #1: Implementing Tangent Bug Algorithm
Ali Nail İNAL
Bilkent University,Electrical&Electronics Engineering
Department
Instructor: Asst. Prof. Uluç SARANLI
Introduction
In this project, we try to implement the tangent bug algorithm, that is a
part of the basic motion planing algorithms family bug algorithms. These
algorithms, generally used for motion plannig with sensor-based robots that
only use basic sensor information to (such as touching sensors, range sensors,
encoders, etc.) plan their path. Bug algorithms are complete algorithms, thus
even though it may not be most efficient, they will give the solution if it
exists. Bug algorithms, make assumption in order to make the plannig problem
easier. They assume robot as a point and think that all sensors working
perfectly, namely there is no error in any estimation or measurements.
The reason we use bug algorithms is their basic structures, and the view
point they provide us for real life examples. Since we can put any object in to
a circle with finite radius r, if we look into the congiguration space it can
be observed as a point object. Thus we can use these algorithms on simple
mobile robots that use cheap and basic sensors for navigation.
Figure1: Workspace and configuration space of a robot.
Details of the tangent bug algorithm and its assumptions will be
introduced later.
Problem
Description
First goal of this assignment is to obtain a simulation environment that
can be used for algorithm simulations that has the following properties:
i.
A
bounded, rectangular workspace
ii.
A configurable set of polygonal obstacles, not
necessarily convex.
iii.
“Virtual"
sensors for measuring the positions of the robot and the goal
iv.
A laser range
sensor with a predetermined range limit (initialized before starting the
simulation), returning an array of distance values for a discrete set of angles
- The ability to accept either velocity, or
discrete displacement commands from a "controller", that can be
used to implement a particular planning algorithm.
After
preparing the simulation environment, we hope to implement tangent bug
algorithm and simulate it in this environment with a robot that do not know
anything about environment but its own location, location of the the goal. It
has a range sensor with finite range limit, and it can move in any direction.
A Brief
Introduction: Tangent Bug Algorithm
Tangent
Bug Algorithm is different from the other bug algortihms, since there is a more
advanced sensor, range sensor, used in order to obtain data about environment.
Sensor gives range data for 360o with discreet steps. It measures the
range between the obstacles and itself and if there is no obstacle in range it
returns the range limit as the distance data. Using this info data, robot finds
the ending points of the obstacles where it can move freely.
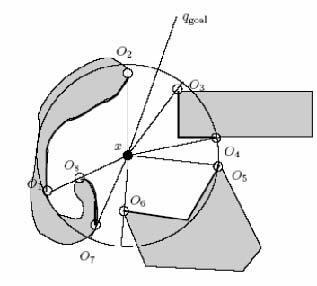
Figure2: Ending
points
Algorithm
makes robot move towards the goal if there is no obstacle in the way. If there is
obstacle it move around it (move towards the ending points). However, if the
ending point is not a real ending point but sensed as one as a result of the
limited range and if it is shortest distance then, it follow the boundries of
the object until either it past the object (robot closer to the goal than the
ending point of the object) or it come to the same point again. The latter one
means that there is no solution for the problem.
A
short description of the algorithm is given below:
While(true)
Repeat Motion-to-Goal
·
Compute
continuous range segments in view
·
Move toward
the point n Î [T, Qi]
that minimizes the heuristic, d(x, n)+d(n, qgoal) until
o
Goal is
encountered. Or
o
The value of
d(x, n)+d(n, qgoal) begins to increase: Continue with boundary
following
Repeat Boundary following
·
Update
Oi ,dfollow, and dreach
·
follow
boundary continuing in same direction as before until
o
Goal
is reached
o
A
complete cycle is performed(goal is unreachable)
o
dreach
<dfollow
end
Implementation
and Results
Implementation
of the algorithm is done on MATLAB platform (code can be seen from the link in
the end). We implemented the algorithm as it is told on the previous sections.
However, we divide the motion to goal to several cases. In first case, if there
is no obstacle seen in the range, robot will control the nearby angles(for the
safety of the path, it tries to make sure that path is larger than one point)
and goes directly through the goal point. In the second case, if there are
objects on the direct path through goal, we find endpoints and the minimum
heuristic distance, and go towards the best end point. At this point, it
controls whether it is close to the object more than a safety distance or not,
and it tries to control the minimum distance to the object, and goes
accordingly. We assume that, the distance between two obstacles will be more
than 2 safety distance. There are some examples for one and two obstacle cases.
Note that when the range changes, path also changes.

Figure 3a: Range 1 unit 1 obstacle (video) Figure 3b: Range 2 unit(video)

Figure
3c: Range 6 unit(video) Figure 3d: Range 1.5 unit(video)
In boundry
following cases, it also use safety distance in the algorithm. It control the
minimum distance to object and try to go outside of the danger zone at every
step. The following examples are boundary following examples with different
ranges.

Figure 4a: Range 0.5 unit(video) Figure
4b: Range 1.5 unit(video)
When the
range increases, path can stay outside of the danger zone easily. Additionally,
as it can be realised from examples, if there is sharp corners, implemanted
algorithm may cause errors if the resolution of the sensor is not large enough.
Additionally,
if there is no solution for the case, such as no endpoint but an obstacle, a
full cycle in boundary following, algorithm will return no solution message.
Conclusion
Our main goals
in this assignment are to understand bug algorithms and implemention of tangent
bug algorithm so that we can understand the difficulties about implementation
of these algorithms. In this assignment by using perfect environment and
sensors we obtain deterministic paths, however in real life we use sensors with
errors, thus, there is a need for decreasing the sensitivity of the system
against sensor errors. Thus our implementation should consider these situations
and needed to be developed. Additionally, this implemantion would have difficulties
to cope with sharp edges.
References
·
"Principles
of Robot Motion" by Howie Choset etal., MIT Press, 2005, ISBN:
0-262-03327-5.
·
"Planning
Algorithms"
by Steven M. LaValle, Cambridge University Press, 2006, ISBN: 0521862051